ACTORS AND COLOURED PETRI NETS IN THE DEVELOPMENT LIFE CYCLE OF DISTRIBUTED REAL TIME SYSTEMS Giancarlo Fortino, Libero Nigro, Francesco Pupo Dipartimento di Elettronica Informatica e SistemisticaUniversità della Calabria, I-87036 Rende (CS) - ItalyEmail: {g.fortino,l.nigro,f.pupo}@unical.it
Abstract: This paper describes an actor-based framework for the development of distributed real-time systems which centres on a holistic approach to the fulfilment of application functional andtemporal requirements through an application tuneable operating software in the form of a reflectivescheduling structure. The framework makes it possible to prototype and execute a specification of agiven system by Coloured Petri Nets in order to verify behavioural and timing constraints. Themethodology favours a smooth transformation of an analysed system to a design and implementationin popular object-oriented languages like C++ and Java.
Keywords: actors, modularity, timing constraints, Coloured Petri Nets, temporal analysis.
target architecture. The approach ensures a smoothtransition from system analysis to design and
In the last years many efforts have been devoted to an
implementation in popular object-oriented languages.
exploitation of modularisation and more general softwareengineering principles in the real-time area, e.g.,
(Bergmans and Aksit, 1996) (Ren et al., 1996). The main
difficulty is concerned with a selection of suitableabstractions which can favour modularisation without
In the proposed approach (Kirk et al., 1997) (Nigro and
impairing fundamental aspects of real time design such as
Pupo, 1997) a system is decomposed into a collection of
time management (scheduling) and control of the
subsystems linked one to another by a (possibly
underlying physical architecture. Conventional solutions,
deterministic) communications network. A subsystem is
e.g., based on plain sequential object-oriented mechanisms
the unit of programming in-the-large. Timing constraints
or built on top of standard, possibly stripped-down,
can be local and/or global. An interaction policy is
Operating Systems relying on over-killing concurrent
required in general at the system level in order for the
facilities (e.g., scheduling driven by priority and pre-
subsystems to correctly co-operate in the fulfilment of
emption) can be inadequate for real time since they can be
lacking of essential abstractions (e.g., concurrency) orcannot be able of guaranteeing a time-predictable
A subsystem is structured as a group of actors plus a
control machine (see Fig. 1) which is in charge of messagescheduling and dispatching. Actors are the basic building
This work claims that an integrated approach based on
blocks in-the-small. They interact one to another by
user-defined scheduling and selected real time abstractions
buffered messages. To help modularisation and time
can be the basis for a predictable and modular architecture
predictability, a variant of the Actor model (Agha, 1986) is
for time critical systems. A methodology is proposed for
actually adopted. Actors are modelled as finite state
distributed real-time systems which is based on an
machines which implement functional behaviour only, i.e.,
adaptation of the Actor model (Agha, 1986) with a
message services. Processing a message consists of a state
reflective and time-driven scheduling structure (Kirk et al.,
transition and the execution of an atomic action. At most a
single message can be under processing in an actor at agiven time. As in the Actor model three basic operations
The methodology defines a full system development life
cycle. Specification and verification activities aresupported by Coloured Petri Nets (CPN) (Jensen, 1992)
• new, for the creation of new actors. The data
(Nigro and Pupo, 1998) which allow a formal description
component of an actor includes as attributes a set of
acquaintances, i.e., the known actors (including itself)to which messages can be sent
Property analysis, e.g., checking that timing constraints are
• send, for transmitting an asynchronous message to a
met, rests on prototype execution and simulation. The CPN
destination actor. The message can carry data values.
model can be iteratively evaluated during a development as
The sender continues immediately after a send
more precise timing information is available from the final
• become, for changing the actor current state. Each state
(EDF) strategy. In a more soft real time context, messages
defines a specific behaviour, i.e., a particular way to
could simply be timestamped by their dispatch time in a
react to expected messages. The processing of an
timeline to achieve a control strategy where messages
unexpected message can be postponed by storing it in
should be delivered as soon as the dispatch time has
expired. Minimum timestamp would guide the messageselection process of the Controller. Other solutions are
Connection to the controlled environment (e.g., anindustrial plant) rests on terminator actors which have an
interface to an I/O device driver and another to regularactors to which normal messages can be transmitted to. Asoften is the case, terminator actors are periodic and can be
driven by a scheduler which provide periodic time clauses.
The following describes a CAN based distributed cruise
control system (Luqi, 1993) whose goal is, when enabled,
to keep a car at a goal_speed by acting on the throttle. CAN (Kirk, 1995) is a priority bus capable of ensuringdeterministic transmission times for both high and low
priority messages (Tindell et al., 1995). It can operate in
hostile physical environments and require a preliminarydesign phase of assigningpriority to network messages
during which each message receives a unique identifierused to resolve conflicts during simultaneous attempts to
Actors are not aware of timing aspects. All of this improves
reusability since actors can be used according to differentapplication timing scenarios (Nigro and Tisato, 1996).
The example system is partitioned into four subsystems:
Timing constraints are handled within reflective actors
Motion, Driver, Cruise and Operator. Each subsystem is
which act as schedulers in the control machine. A
composed of one actor and associated control machine.
scheduler is a filter (Bergmans and Aksit, 1996) which
Operator is used to Init (i.e., making ready to run), Start
transparently captures local or network originated
(i.e., triggering into execution) and Stop (i.e., making no
messages and apply to them scheduling actions. Scheduler
operating, for safety reasons) the system. Cruise hosts the
is also responsible of translating, with the help of
control system. Motion reads the speed from a speedometer
application actors, from the external network message
and acts upon the throttle. Driver senses the buttons Set
format into the local format of the subsystem address
and Resume, respectively used by the driver to engage
cruising at the current speed and to resume cruising to apreviously goal_speed set. Driver is also sensitive to each
Actors are concurrent units. Concurrency is ensured, in a
use of the Brake and the Accelerator.
subsystem, by message processing interleaving. TheController component of the control machine repeats a
Motion includes speed (float), slope (float) and throttle
control loop where a message at a time is selected from the
(float) data attributes. Cruise has attributes such as speed
Message Plan according to a control strategy, anddispatched to the relevant application actor. The latter
(float), goal_speed (float), throttle (float) and accelerator
provides the service requested by the message and can in
turn generate new local or network messages. Localgenerated messages and incoming network messages are
The behaviour of the entire system is periodic. The basic
eventually scheduled by the Scheduler component by
period p1 is dictated by speed sensor technology. In the
applying suitable time clauses (Ren et al., 1996) (Nigro
following a frequency of 10 readings/sec is assumed,
and Pupo, 1997). After that the Controller loop is repeated
corresponding to a p1=100 ms.
The overall periodic behaviour is ensured by having the
The control machine can be customised through
system which is initialised and started “synchronously” by
programming. First of all, the Scheduler actor can be
the Operator (the character of CAN as a network with a
replaced to reflect special application-dependent
“virtual zero” transmission time, when comparing the time
requirements. In addition, messages can be scheduled in
granularity of the application (ms) with the effective
the Message Plan according to different timing schemes
transmission time of a typical control packet (e.g., 130 µs),
and Real Time Clock systems. For example, a time validity
should be noted) and by ensuring that Motion and Driver
interval [tmin, tmax] can be attached to each message m to
express the constraint that m can’t be dispatched beforetmin and should not be dispatched after tmax to avoid a
Although Brake, Set, Resume and Accelerator are naturally
timing violation. In this case, the selection process of the
sporadic sources of messages, for the purposes of the
Controller should be based on a Earliest Deadline First
example, also considering the physical dynamics of the
system, they are polled periodically with a period p2 of 1 s.
Therefore, both Motion and Driver use a local Readmessage for maintaining the reading process.
Different factors, local + global, contribute to ensuring thereal-timeness of an actor system. In the small, message
In response to the Read message, Motion and Driver
responses (actions) in actors must have a bounded
sample the external environment for reading respectively
execution time. Therefore some constructs should be
the Speed (Motion), Set (Driver), Resume (Driver), Brake
avoided (e.g., recursion, loops without bounded iterations,
(Driver) and Accelerator (Driver). Motion/Driver will send
dynamic data structures . ). In the large, an adequate
to Cruise the just read quantity through a suitable Speed,
interaction policy among the various control machines must
Set, . message. Normally, Driver will find only one
be designed which depends on the application
external condition verified per period. Indeed, the use of
requirements and the assumptions of the adopted
Set is mutually exclusive with Resume and so forth. The
communications network. For the cruise example over
sensed condition is transferred to Cruise by an inter-
CAN, an interaction policy results from a priority
assignment to network messages and a suitable choice ofthe time clauses within the schedulers. The following
As a consequence of a Read message, two transactions or
threads of control (chains of causally connectedmessages)are respectively started in Motion and Driver. The thread
( Stop, Init, D_OkInit, M_OkInit, C_OkInit, Start, Brake,
originating into Motion is composed of the Speed message
Accelerator, Speed, Throttle, Set, Resume ).
sent to Cruise, followed by the Throttle message generatedby Cruise toward Motion. The second thread ends in the
Figure 4 summarises the time clauses embodied by the
Cruise subsystem since any sensed variable affects only the
different schedulers, in Java syntax. m denotes a “just sent
Cruise state (e.g., enabling/disabling cruising).
message”. Scheduling uses time validity intervals formessages (see section 2). m.cause() denotes the message
For safety reasons, Brake or Accelerator, which can
whose processing generated m. m.iTime() returns the
disengage cruising, are to be handled with a tight deadline
invocation time of m. now() returns the current time.
of 1 ms measured since the capture time. On the otherhand, during cruising the throttle is required to be acted
within a 100 ms deadline. Similarly, a stop command from
if( m instanceof Read && m.cause()==m )
the operator is expected to be managed within 1 ms. Figure
schedule( m, m.cause().iTime()+p1, m.cause().iTime()+p1 );else schedule( m, now(), now() );
2 summarises the timing requirements of critical threads.
if( m instanceof Read and m.cause()==m ) schedule( m, m.cause().iTime()+p2, m.cause().iTime()+p2 );
Figure 2: Timing requirements of critical threads.
It is worth noting that the Cruise subsystem acts as a globalsupervisor and is strictly reactive. In addition, timinginformation such as p1 and p2 are fed to the scheduler
speed=0.0; goal_speed=0.0;throttle=0.0;become(INITIALIZED);
Components of the described actor framework (actors,
subsystems, schedulers, control machines, network
interfaces and protocols, .) can be formally described by
Coloured Petri Nets (CPN) (Jensen, 1992) to enable
validation activities (Jensen, 1994). The aim is to build a
system specification which can be executed in order to test
both functional and temporal properties (Nigro and Pupo,
(goal_speed-speed)*30.0;send throttle to Motion;
1998). CPNs can be used in the context of Design/CPN
(Jensen et al., 1996) which favours the specification of a
complex system by modularising it into subnets (pages)
Figure 3: Cruise actor functional behaviour.
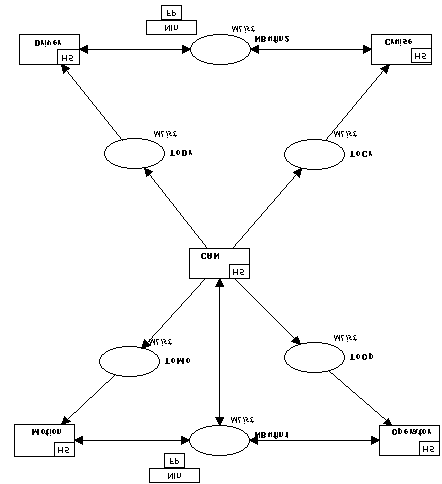
The following shows some components of a CPN model forthe cruise control example. Fig. 5 is the topmost level page
Object Oriented Analysis (OOA) methods like Shlaer-
in the model. It represents the more abstract view of the
Mellor, OMT . can directly be used for visualisation
system and consists of the four subsystems linked to one
purposes of static structure and dynamic behaviour of
another by CAN. Each high-level component is modelled
actors. Figure 3 summarises the State/Event/Action model
by a substitution transition and in turn is Hierarchically
of the cruise actor. It should be self-explanatory.
Substituted (HS) in a subpage containing the specialisation
details. The substitution operation is accomplished by a
Fig. 7 shows the Cruise subsystem subnet. It includes the
binding between sockets in the super page and
control machine, the Cruise actor and the input/output
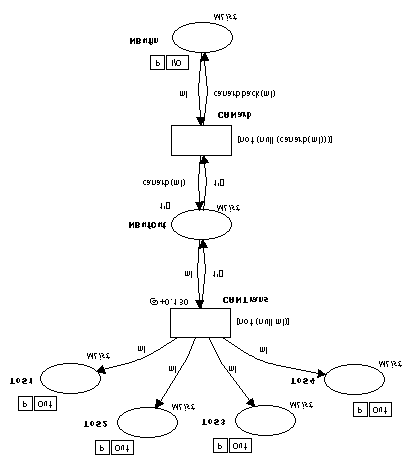
corresponding ports in the subpage. Fig. 6 depicts a CAN
subnet. NBufIn is a port-place linked to all the outputsocket-places in the various subsystems. It is used to
The list of the expected external messages is carried by the
broadcast a network message. The token-message list in
token in the ExpMsgs place. A CAN message is actually
NBufIn contains, at any moment, the set of sent messages
received by the transition FromCAN which translates and
ranked by priority, waiting to be transmitted by CAN.
appends it to the local generated message list (place
Transition CANarb models the arbitration process. The
CMPIn). An output network message is transmitted by
highest priority message is actually selected by CANarb
ToCAN transition which inserts it ranked into the message
only when the network is idle. Transition CANTrans
list of NBufIn place of the CAN net (NBufIn and ToNetP
models the message broadcast and its transmission delay.
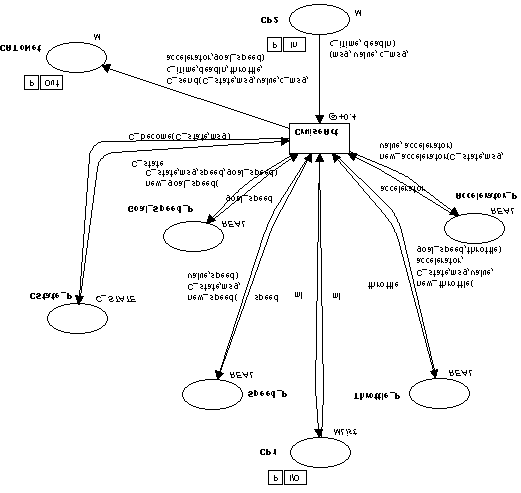
are mirroring places). The scheduler subnet applies thetime clauses of the Cruise subsystem according to Fig. 4. The controller subnet implements message selection anddispatching operations of the control machine. Selection isbased on the EDF strategy. The Cruise actor subnet isshown in Fig. 8. The model embodies theState/Event/Action diagram of Fig. 3. It generates CANmessages through the CAToNet place which mirrorsToNetP1 output place of Fig. 7. The time-consumingactivity (action) is implemented by transition CruiseActwhich is in charge of accepting an incoming message andprocessing it by suitable arc inscriptions (ML functions)which update the actor internal status and attributes.
Design/CPN allows both informal and formal analysismethods to be applied to an achieved system model. Informal analysis can be based on model simulation(specifications testing (Ghezzi et al., 1991)), i.e., byproviding an initial marking and then by tracing one ormore possible resulting behaviours. By observing thesebehaviours the analyst can realise whether or not thespecified system meets functional or temporalrequirements.
Figure 5: Top level CPN model for the Cruise system.
Formal analysis consists in defining general properties ofthe net model which reflect special types of desirable (orundesirable) behaviours of the specified system, and thenusing the specification to formally prove (or disprove) suchproperties. For this purpose the occurrence graph (OG)method (Jensen, 1994) can be used. An OG is a directedgraph which has a node for each reachable marking and anarc for each occurring binding element. An arc links thenode of the marking in which the associated bindingelement occurs to the node of the marking resulting fromthe occurrence. All standard properties like absence ofdead markings, reachability and boundedness analysis . can be checked on the OG. It is worthy of note that the OGmay become very large, even for relatively small nets, thatit cannot possibly be generated even with the mostpowerful computer. Another limitation is dependency fromthe initial marking: each possible initial marking mayoriginate a different occurrence graph.
Functional analysis of the Cruise system was conducted byusing a simple mathematical model for the motion model(Luqi, 1995) and by tracing the causally connectedmessages of every thread at the Design/CPN graphicaluser-interface, e.g., by a step-by-step simulation.
From the temporal point of view Design/CPN doesn’tprovide specific analysis techniques. However, the generalsupport for functional analysis together with a primitive
time notion, ensured by a global clock, can be used to
achieve a timing analysis framework for actor systems
message from the Plan can require an update of the system
(Nigro and Pupo, 1998). Transitions can be assigned a
clock to the lower bound of the message time validity
delay. Tokens are timestamped by transition fire times.
Generated tokens are frozen in the output places until thesystem clock gets advanced to their timestamp. At any
The frozen behaviour of generated tokens is compatible
instant the system clock is advanced to the token
with the simulation of a distributed system. Different
timestamp representing the minimum time increment in the
actors into different subsystems/processors are capable of
whole CPN model. The timestamp of a token can be
concurrent execution. However, the simulated CPN clock
modified by a transition predicate or an arc inscription.
is always augmented by the minimum timestamp thus
This was exploited in the realisation of the control machine
preserving its chronological advancement.
subnet where, in general, the selection of the next dispatch
Figure 7: The Cruise subsystem subnet.
Besides querying the OG for standard properties,
non standard properties. One such a function can capture
specific ML functions can be introduced for checking
the verification of a temporal property in positive or
negative form, e.g., one like the following: “is it alwaystrue that for each instance of a given transition firing(representing, e.g., the beginning of a thread) there
This paper describes a computational model based on
always (as the OG state space allows) exists an instance
actors which makes it possible to develop distributed
of the corresponding transition firing (modelling, e.g.,
real-time systems. The model favours time-predictability
the end of the thread) such that the time distance
and relies on non-preemptive light-weight concurrency. between them is less than a fixed time interval (e.g.,
A distributed system can be formalised by Coloured
deadline of thread execution) ?” The negative form of a
Petri Nets (CPNs) in order to support functional and
property can be more immediate. In this case the
temporal validation activities. Ensuring predictability at
existence of a single occurrence of a searched event that
the system-level strongly depends on the adopted
contradicts the property is sufficient to assert that the
Directions of current work cover an application of the
For the temporal analysis of the Cruise system, the actor
actor framework and CPN modelling to challenging
transitions were annotated by an estimation of worst-
distributed measurement (Grimaldi et al., 1998) and
case-action-execution-times, which were 40 msec for the
multimedia systems (Fortino et al., 1998) over Internet.
Motion, 0.4 msec for the Cruise and 10 msec for theDriver. The system was then studied by generating its
OG for a simulation period where significant activity
Work carried out under the financial support of the
occurs, e.g., by ensuring that when cruising is enabled
Ministero dell'Università e della Ricerca Scientifica e
multiple and conflicting threads are interleaved.
Tecnologica (MURST) in the framework of the Project"Methodologies and Tools of High Performance Systems
Fig. 9 exemplifies an ML check function that verifies the
deadline of cruising under automatic control. Forsimplicity, the transmission of message data is disabled,thus focusing on temporal aspects only. Similar
functions can be written for checking the deadline of aBrake or Stop message.
Agha, G. (1986). Actors: A model for concurrent computation indistributed systems, MIT Press.
Bergmans, L. and M. Aksit (1996). Composing synchronisation
and real-time constraints. J. of Parallel and DistributedComputing, September.
Grimaldi, D., L. Nigro, and F. Pupo (1998). Java based distributed
if ((ArcToTI(a) = TI.MotionActor'MotionAct 1)andalso
measurement systems. To appear on IEEE Trans. on
(StripTime(Mark.MotionActor'PSNet 1 (DestNode(a))) =
Instrumentation and Measurement.
Fortino G. and L. Nigro (1998). QoS centred Java and actor based
framework for real/virtual teleconferences. Proc. of SCSEuroMedia98, Leicester (UK), pp. 129-133.
if ArcToBE(b) = Bind.MotionActor'MotionAct(1,
Jensen, K. (1992). Coloured Petri Nets - Basic concepts, analysismethods and practical use. Vol. 1: Basic concepts. EATCS
Monographs on Theoretical Computer Science. Springer-Verlag.
then ((OccurrenceTime(b)-OccurrenceTime(a))<100.0)
Jensen, K. (1994). Coloured Petri Nets - Basic concepts, analysismethods and practical use. Vol. 2: Analysis methods. EATCS
Monographs on Theoretical Computer Science. Springer-Verlag.
Jensen, K., S. Christensen, P. Huber and M. Holla. (1996).
Design/CPN. A reference manual. Computer ScienceDepartment,
Figure 9: Cruise control deadline checking function.
Kirk, B. (1995). Real time protocol design for Control Area
Networks. Proc. of Real Time Systems’95, pp. 251-268.
CruiseDeadln() tries to build a list with instances of the
Kirk, B., L. Nigro and F. Pupo (1997). Using real time constraints
MotionAct transition of Motion actor corresponding to
for modularisation. Proc. of Joint Modular LanguagesConference, Springer-Verlag, LNCS 1204, pp. 236-251.
the generation of a Speed message (beginning of thread)
Luqi (1993). Real-time constraints in a rapid prototyping
which are followed by a causally connected instance of
language. Computer Languages, 18(2), pp.77-103.
Nigro, L. and F. Pupo (1997). A modular approach to real time
the MotionAct transition corresponding to a Throttle
programming using actors and Java. Proc. of 22nd IFAC/IFIP
processing (termination of the thread) which doesn’t
Workshop on Real Time Programming, Lyon, 15-17
fulfil the deadline. The function always returns an empty
Nigro, L. and F. Pupo (1998). Using Design/CPN for the
list, thus the property is satisfied.
schedulability analysis of actor systems with timing constraints. Proc. ofWorkshop and Tutorial on Practical use of Coloured
The CPN model supports incremental developmentPetri Nets and Design/CPN, University of Aarhus, AarhusDenmark, 8-12 June.
according to a spiral system life cycle (Verber et al.,
Nigro L. and F. Tisato (1996). Timing as a programming in-the-
1997). As the temporal information (message processing
large issue. Microprocessors and Microsystems, 20(4), pp.
times) become more precise, i.e., the project is tuned to
the target physical architecture, system timeliness can be
Ren, S., G. Agha and M. Saito (1996). A modular approach for
programming distributed real-time systems. J. of Parallel and
re-checked and requirements possibly adjusted to ensure
Distributed Computing, Special issue on Object-Oriented Real-
guaranteed schedulability. The key point is that the CPN
model closely mirrors the design and implementation
Tindell K., A. Burns and A.J. Wellings (1995). Analysis of hard
real-time communications. Real-Time Systems, 9(2), pp.147-
models. Conclusions drawn from the analysis model can
directly be interpreted at the more low level stages of
Verber D., M. Colnaric, A.H. Frigeri and W.A. Halang (1997).
Object orientation in the real-time system lifecycle. Proc. of22nd IFAC/IFIP Workshop on Real Time Programming, Lyon,15-17 Sept. 1997, pp. 77-82.
PHI 1110B Introduction to Philosophy Professor “Philosophy begins with wonder,” so said Aristotle more than two thousand years ago. Hence this course aims at an introduction to the basic problems and methods of philosophy. The fundamental and existential questions facing every one of us, like the problem of death; the meaning and purpose of life, the question of knowledge, reality and
LIST COMPILED PURSUANT TO SECTION 1086 OF THE TAXES CONSOLIDATION ACT, 1997, IN RESPECT OF THE PERIOD BEGINNING ON 1 October 2012 AND ENDING ON 31 December 2012, OF EVERY PERSON – in whose case the Revenue Commissioners accepted a settlement of the kind mentioned in Section 1086. The list also includes cases in which a Penalty Determination was made by the Courts in respect of the same period.
 details. The substitution operation is accomplished by a
Fig. 7 shows the Cruise subsystem subnet. It includes the
binding between sockets in the super page and
control machine, the Cruise actor and the input/output
corresponding ports in the subpage. Fig. 6 depicts a CAN
subnet. NBufIn is a port-place linked to all the outputsocket-places in the various subsystems. It is used to
The list of the expected external messages is carried by the
broadcast a network message. The token-message list in
token in the ExpMsgs place. A CAN message is actually
NBufIn contains, at any moment, the set of sent messages
received by the transition FromCAN which translates and
ranked by priority, waiting to be transmitted by CAN.
details. The substitution operation is accomplished by a
Fig. 7 shows the Cruise subsystem subnet. It includes the
binding between sockets in the super page and
control machine, the Cruise actor and the input/output
corresponding ports in the subpage. Fig. 6 depicts a CAN
subnet. NBufIn is a port-place linked to all the outputsocket-places in the various subsystems. It is used to
The list of the expected external messages is carried by the
broadcast a network message. The token-message list in
token in the ExpMsgs place. A CAN message is actually
NBufIn contains, at any moment, the set of sent messages
received by the transition FromCAN which translates and
ranked by priority, waiting to be transmitted by CAN.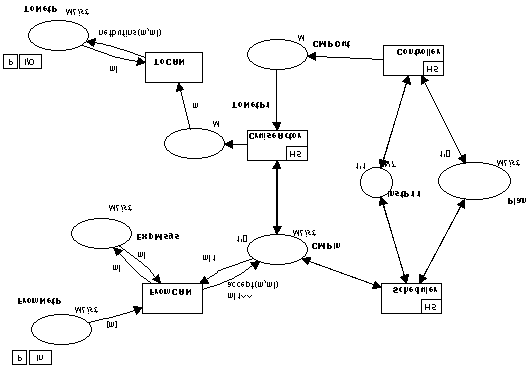
 achieve a timing analysis framework for actor systems
message from the Plan can require an update of the system
(Nigro and Pupo, 1998). Transitions can be assigned a
clock to the lower bound of the message time validity
delay. Tokens are timestamped by transition fire times.
achieve a timing analysis framework for actor systems
message from the Plan can require an update of the system
(Nigro and Pupo, 1998). Transitions can be assigned a
clock to the lower bound of the message time validity
delay. Tokens are timestamped by transition fire times.